一、研究方向
围绕人工智能和智能机器人基础理论、控制芯片、操作系统、智能装备以及智能机器人生态系统等方面,开展泛在智能机器人基础理论研究与关键技术攻关,打造自主进化、协同智联、全息群智的新一代泛在智能机器人理论技术体系、核心技术和和系列化产品。
二、核心技术
泛在智能机器人技术体系,包括全息群智智能理论、芯片、智能互联操作系统、机器人驱控、数字孪生、视觉感知、脑机接口等基础关键技术及面向智能制造、智慧城市、智慧医疗等领域的实用泛在智能机器人终端与系统产品。
三、主要成果
主要成果包括数字孪生群智无人系统、机器人智能互联操作系统、泛在控制器、一体化驱控系统、AI自编程机器人、智能焊接机器人、双臂五觉特种机器人、自主交互中医机器、自主移动服务机器人等。
1. 面向智慧园区的数字孪生安防巡检群智无人系统
针对园区、车站、机场、商场等安防巡检场景的实际需求,以群体无人车、无人机等为移动载体,在突破群智算法、场景感知、行为识别、脑机交互、智能芯片等共性关键技术的基础上,成功开发了基于数字孪生实时可视化管控技术,实现场景的无人化、可视化动态智能监控。可全面提升目标场景中的人、机、环境的数字化、可视化、智慧化、无人化的管理与控制水平,大幅提高效率,降低人工需求。
该系统在季华园区成功示范的基础上,将以产品化目标为导向,提升整套系统安装部署的便捷性、长期使用的可靠性和易维护性等,服务于佛山市、广东省乃至全国的智慧城市、智慧园区、智能工厂建设 。
 图1:季华实验室园区的数字孪生三维可视化模型
图1:季华实验室园区的数字孪生三维可视化模型
2.面向机器人的智能互联操作系统
开发了具有自主知识产权的“机器人智能互联操作系统”及赋能引擎。具有全面开源、技术透明、成本可控、技术体系完整、多范式编程模型,灵活自编程、数字化接口,轻松实现上行下控等技术特点。
系统采用软硬一体的硬实时内核技术使得中断响应性能可提高5~6倍。不仅如此,以数字双胞胎为虚拟空间和物理空间的交互中介,形成智能制造系统的上传下控机制,实现了融合物料、信息与工艺的三流融合进程。应用AI与区块链技术,发挥云化群智智能的技术优势,构建了全息智联云操作系统。还拓展了目前主控芯片对系统周边I/O的控制力度,增加了底层通讯外设端口,如SPI,I2C,UART等。
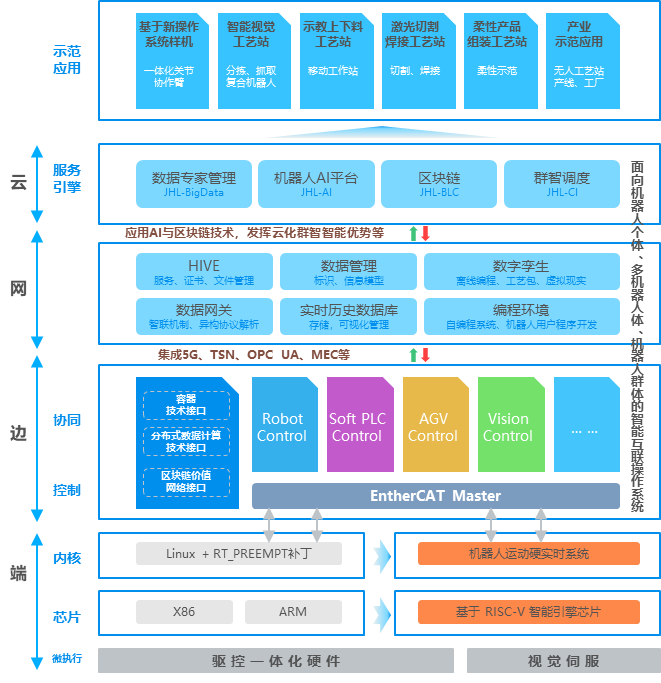 图2:机器人智能互联操作系统架构
图2:机器人智能互联操作系统架构
该系统适用于智能工艺单元站、智能产线、智能工厂等多种产业应用场景。目前已在全球最大的汽车钢帘线生产大厂-江苏兴达进行示范应用。在装备层、管理层、调度层三层都具备了实时控制性能。
3、机器人泛在控制器、一体化智能机器人驱控系统
机器人泛在控制器是可嵌入到装备的高效、快速的控制系统,为装备提供运动控制及逻辑控制功能,可用于作为机器人运动控制器、AGV控制器及逻辑控制器。它吸纳了ROS、DDS等软件系统及模块的优点,为复杂多节点系统给出了一个稳定可靠的分布式控制解决方案。
 图3:机器人泛在控制系统
图3:机器人泛在控制系统
一体化智能机器人驱控系统RS60E是实验室独立自主研发、具有完全知识产权的高性能的机器人驱控系统,解决了近年来机器人行业对驱控系统提出的高精度、快响应、高同步、易整定、体积小、低成本等痛点与难点问题,其功能、性能、成本均超越了国内同类型产品,达到了国内领先水平,为国产替代进口提供了强有力的选择。已申请17项以上的发明专利。目前处于批量生产和市场推广阶段,已小批量提供用户试用和测试,具备了产业化落地条件。参加了各类国际国内展会,获得一致好评。

图4:机器人专用6合1伺服驱动器
4.AI自编程快速部署机器人
为实现生产制造向数字化、智能化转型升级,针对传统自动化线柔性差、换型难、智能程度低的桎梏,成功开发了AI自编程快速部署机器人。自编程机器人革新了工业机器人的使用方法,基于国际先进水平“元学习”算法,通过语言、动作、手势、图像等多维度多模态人机共融技术,赋予了工业机器人的“大脑”,形成了一种具有自主“思考”与“决策”能力的“拟人化”机器人,使工业机器人的上线部署周期从3至7天缩减到1个小时以内。自编程机器人已在家电产业PCB柔性检测产线应用。AI自编程快速部署机器人技术有望在家电、3C等行业获得广泛的推广应用。
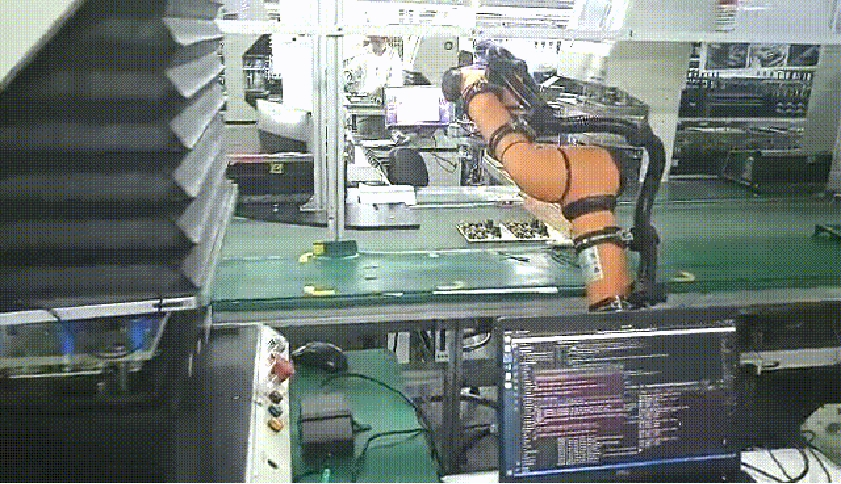 图5:AI自编程快速部署机器人在美的电器现场测试
图5:AI自编程快速部署机器人在美的电器现场测试
5.基于视觉和数模双驱的高效智能焊接机器人
基于视觉和数模双驱的高效智能焊接机器人,采用3D视觉和数字模型两种方式自动识别焊缝轨迹和焊枪姿态,实现自动避障和最优路径,结合焊接工艺专家数据库,自动生成机器人运行程序。该系统最大优点是免编程,少调试,减少依赖专业技术人员,快速部署,提高了机器人系统集成应用的效率,极大促进了焊接工业机器人技术的智能化跨越式发展,可广泛应用于船舶、桥梁、重工、石化等行业的大型钢结构焊接。
 图6: 地轨式智能机器人焊接工作站
图6: 地轨式智能机器人焊接工作站
6.双臂五觉特种机器人
针对突发性危险爆炸事故中执行爆破、排障、扫雷等危险,季华机器人中心研发的全息五觉双臂特种机器人,实现机器人替代人工在危险环境下执行多种侦测和救援任务。
双臂五觉特种机器人具有拟人五觉(视觉、听觉、嗅觉、味觉、触觉)、直觉控制、双臂自主协同、自主导航定位等特点,是国际首台集成拟人六觉(视觉、听觉、嗅觉、味觉、触觉和直觉)传感控制器和实现双臂自主协同控制的应急处置特种机器人。
 图7:双臂五觉特种机器人
图7:双臂五觉特种机器人
7、自主交互中医智能服务机器人及其系统平台
将机器人运动控制、深度学习、知识图谱、大数据分析等人工智能技术应用和服务于传统中医诊疗,研发系列中医服务智能机器人及其系统平台。包括研发全流程标准化、智能化的现代化中医装置与设备,并建立中医辅助诊断技术体系与方法标准;构建以中医诊断为核心的表型特征规范化、智能化信息体系,结合中医名家经验和大数据阐明辅助诊断机制;将每个中病、西病、表征、疾病过程、中医证素作为本体构建中医知识图谱,并构建中医诊断学数据库形成可搜索可推荐的知识体系
 图8.:仿生三部脉诊智能装备
图8.:仿生三部脉诊智能装备
8.产学研联合攻关
面向国家和地方的重大需求,围绕泛在智能机器人核心技术,积极参与产学研联合攻关,目前研究课题还包括复杂环境多感知交互智能护理机器人、新型自主移动服务机器人、基于AI的在线智能视觉检测技术与装备等。相关技术已助力智能制造、智慧城市、智慧医疗等领域的科技进步,进一步改善了人民的生活水平和质量,推进社会繁荣与发展。
四、未来计划
研究新一代泛在智能机器人理论技术体系、核心技术和系列化产品,成为智能机器人领域国内领先、国际先进的高科技研发中心。
机器人工程研究部以“顶天立地,全面开放,以人为本,注重实效”为建设宗旨,针对我国机器人“缺芯少魂”、核心技术长期受制于人的问题,聚焦新一代泛在智能机器人理论技术体系、核心技术和系列化产品的研发,达到上可“顶天”解决高难度核心技术问题,下可“立地”推进复杂高新技术科研项目应用落地,引领中国智能机器人技术的发展。