季华实验室智能机器人工程研究中心青年科研人员发表多项创新成果
季华实验室智能机器人工程研究中心“智能机器人基础性关键性技术研究项目团队”(以下简称基础专项)自组建以来,在实验室和中心的支持下,注重青年科研人员的培养和使用,鼓励他们在工作中不断开拓创新。近日,以黄秀韦博士、刘振博士为代表的青年科技工作者的多项相关成果被国际知名期刊录用。
成果一
无模型自适应控制
—— 工业生产的新控制模式
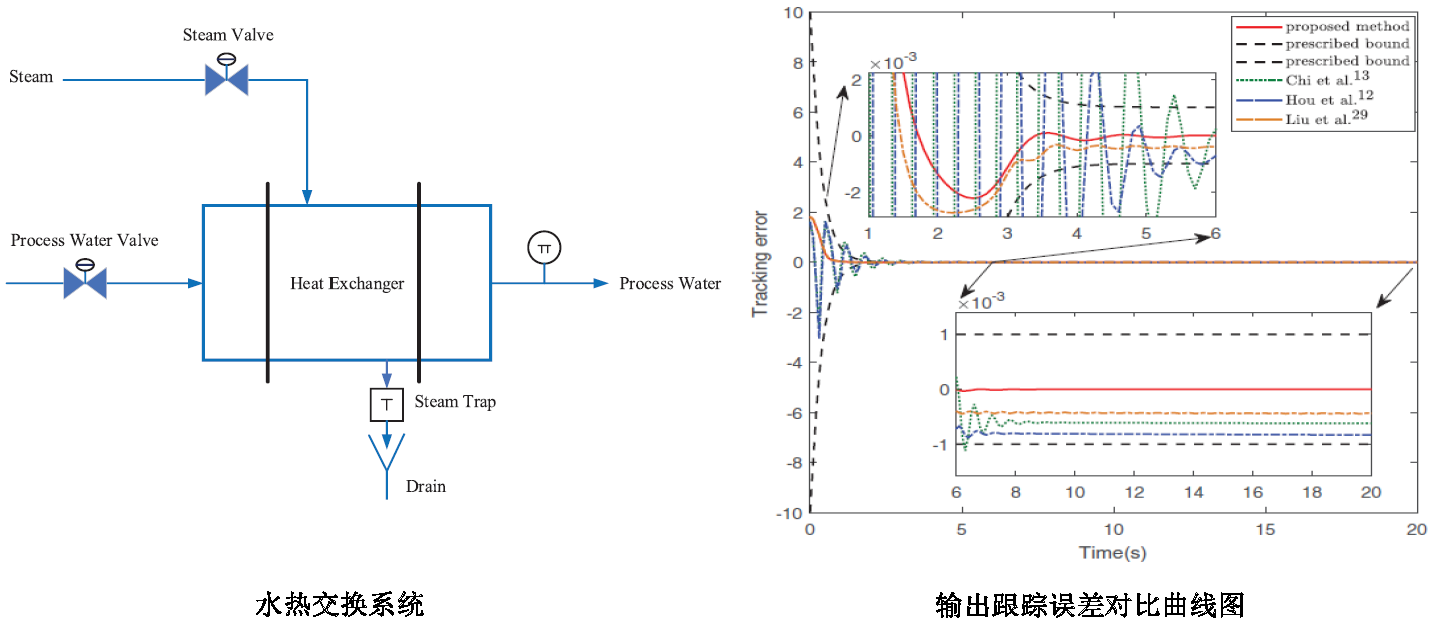
随着工程技术的不断发展,实际系统的复杂性日益增加,导致精确的系统建模成为最困难的任务之一,因而,基于数学模型的控制策略不再适应这种复杂的系统。为了克服这一问题,仅使用输入和输出数据的数据驱动控制方法应运而生,目前已应用于许多实际场景,例如四旋翼飞行器车辆、自动驾驶汽车、连续机器人和其他工业过程系统。 在现有的数据驱动方法中,无模型自适应控制(MFAC)方法备受关注。然而,该方法要求原始非线性系统满足一个通用的 Lipschitz 条件,并且连续两个瞬时之间的控制输入差异非零。此外,当非线性系统存在不确定性和干扰,一般采用伪偏导(PPD)参数来捕获实时动态,但不包含非线性项。这样做的一个明显缺点是,伪偏导数参数在复杂的非线性系统中具有复杂的动力学,很难精确估计。进一步,除了应对未知时变不确定性外,在工业过程中实现预先确定精确的瞬态和稳定状态性能也是十分艰巨但非常必要的。 基础专项黄秀韦博士作为第一作者、董志岩博士作为通讯作者撰写的题为《Discrete-time extendedstate observer-based model-free adaptive sliding mode control with prescribedperformance》的学术论文被控制领域老牌权威期刊 INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROL 录取并于2022年2月在线发表。 该项工作针对具有未知扰动的实际非线性系统的轨迹跟踪和高控制精度问题,提出了一种新的基于离散时间扩展状态观测器(DESO)的具有预设跟踪性能的无模型自适应滑模控制策略。该工作不仅能使得非线性系统的输出跟踪误差轨迹同时按预先设定的瞬态和稳态轨迹收敛,还能在工业生产遭遇较大外部扰动时保持优越的性能,具有很强的鲁棒性,具体控制流程如下图。 该工作首先采用动态线性化方法重构离散时间非线性过程,通过自适应方法获得与控制输入线性相关的时变参数,并通过DESO估计未知非线性项。然后,通过考虑规定的性能并使用从约束跟踪误差转换而来的无约束向量,设计了一种无模型滑模控制器。此外,提出了严格的稳定性分析,以显示滑模函数的有界性以及输出跟踪误差的预设瞬态和稳态性能。最后将所提方法应用于水热交换系统,控制方案的有效性和优越性得到了验证(如下图所示)。△ 水热系统算法应用结果图
成果二
—— 实现超声电机大功率输出
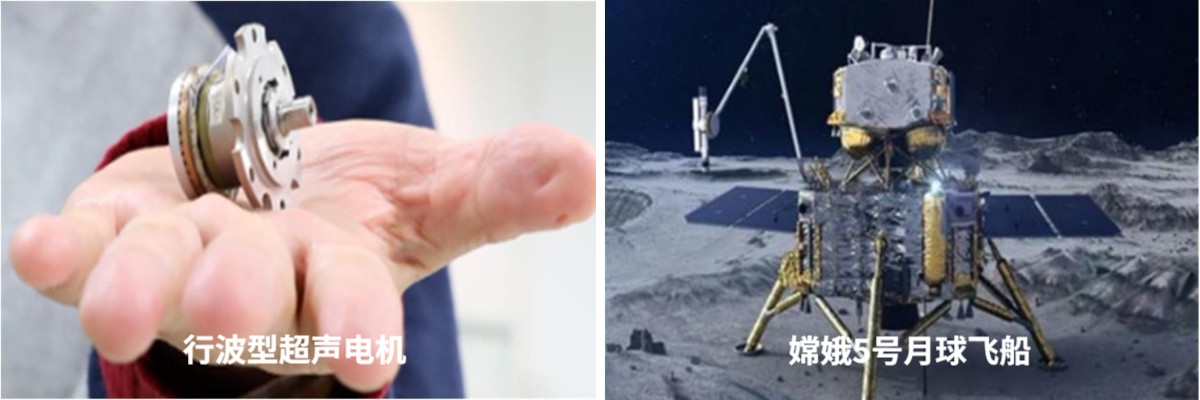
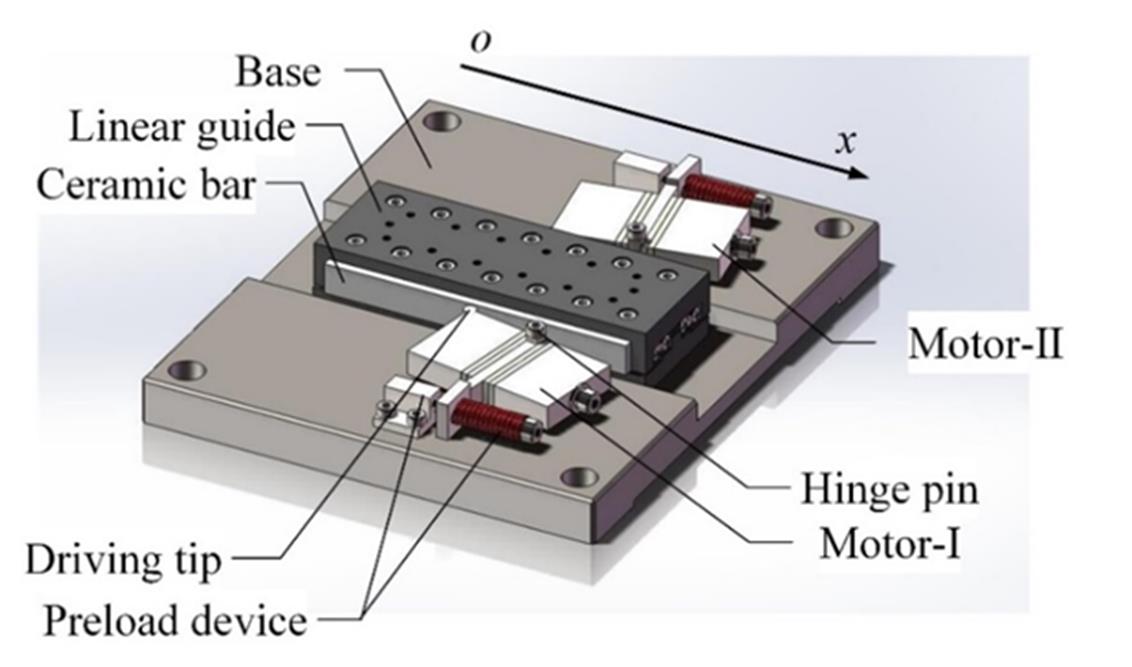
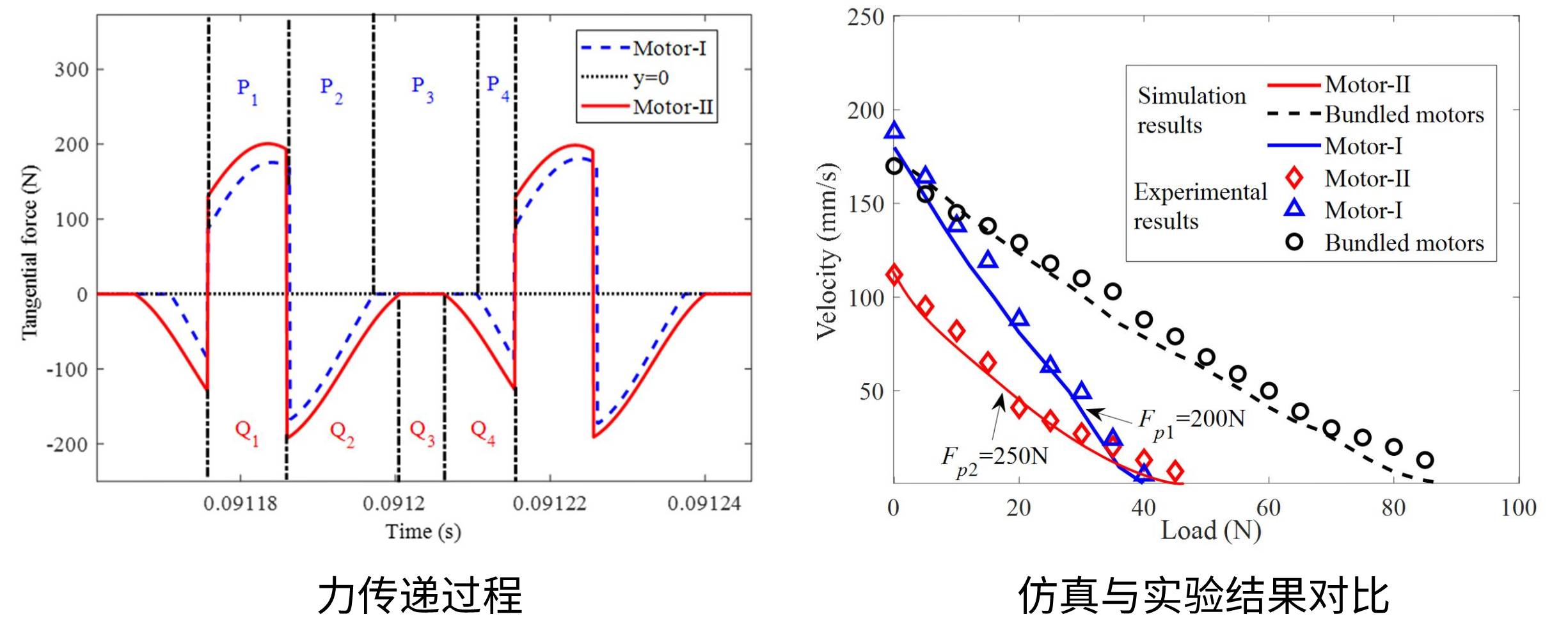
随着科学技术的不断发展,高新技术领域对驱动元件的要求越来越高。因此,近年来许多国内外专家学者一直专心于研发新原理、新结构的电机,如静电电机、超声电机(Ultrasonicmotors)、仿生电机、光热电机、形状记忆合金电机、微波电机等。其中,超声电机由于其易于小型化、定位精度高、能量密度大、响应时间短、断电自锁、无噪声、能适应多种极端环境、抗电磁干扰等优点,受到了广大学者们的青睐。超声电机是利用压电陶瓷的逆压电效应来工作的,其首先通过电信号激发压电陶瓷产生形变,然后通过与压电陶瓷紧密贴合的弹性体将这种形变能传递到定子的驱动足上,再依靠驱动足与动子(或转子)之间的摩擦作用驱动动子(或转子)做宏观上的直线运动(或旋转运动)。在过去的十多年中,超声电机广泛地应用于多个技术领域,从我们日常生活中使用的产品(如手机、相机镜头、汽车、机器人等),到最先进的航空航天领域(如我国的嫦娥三号、四号和五号登月飞船以及“行云二号”的1、2号和“巢湖一号”卫星),都能发现超声电机的踪迹。实际应用中,单个超声电机的输出功率比较小,往往难以满足使用要求。为了获得更大的输出功率,对超声电机并联技术的研究成为了一个热点。相比于改变超声电机定子的结构,多定子并联的一个显著优点是无需重新设计定子的结构。然而,多定子并联所产生的功率并不是几个电机功率的线性叠加。近日,基础专项刘振博士作为第一作者在国际学术期刊 Ultrasonics 上发表了题为“Dynamic modeling andanalysis of bundled linear ultrasonic motors with non-ideal driving”(非理想驱动情况下直线超声电机并联动力学建模与分析 DOI: https://doi.org/10.1016/j.ultras.2022.106717)的研究论文。针对两个并联的直线超声电机的动力学特性进行研究,寻找实现并联电机输出功率最大化的激励方法。论文利用构建的非理想驱动情况下直线超声电机并联的动力学模型,分析了并联电机协同运动中异步问题及干涉现象,阐明了非理想驱动情况下双定子工作时的力传递过程,所提出模型的有效性和准确性得到了试验的验证。△ 结果分析图
引申阅读
季华实验室智能机器人工程研究中心以“顶天立地,全面开放,以人为本,注重实效”为建设宗旨,针对我国机器人“缺芯少魂”、核心技术长期受制于人的问题,聚焦新一代泛在智能机器人理论技术体系、核心技术和系列化产品的研发,达到上可“顶天”解决高难度核心技术问题,下可“立地”推进复杂高新技术科研项目应用落地,引领中国智能机器人技术的发展。基础性关键性技术研究项目由国家重大人才引进工程专家张立华教授牵头。项目针对智能机器人领域的基础共性关键技术,基于原创全息群智智能理论,实现智能机器人适用的新一代人工智能算法;以群智芯片为基础打造基础硬件支撑,提供群智机器人感知、认知、决策与执行的核心大脑;从机器人控制技术切入,攻关机器人的新型驱控、一体化关节等机器人核心器部件,助力形成全自主、智能化、高性能的机器人智能终端产业共性关键技术。